غارهای طبیعیای که میتوانند در آینده به پناهگاههایی ایدهآل برای پایگاههای انسانی روی ماه تبدیل شوند. این ساختارهای زیرزمینی قادرند فضانوردان و تجهیزات را از تابشهای کیهانی خطرناک و نوسانهای شدید دمایی که در سطح ماه رخ میدهد، محافظت کنند. به همین دلیل، این غارها از نظر علمی و راهبردی، جزو باارزشترین مناطق در کل منظومه شمسی به شمار میآیند.
با این حال، پیش از هرگونه بهرهبرداری علمی یا انسانی، یک چالش بسیار جدی وجود دارد: چگونه اصلاً میتوان به این غارها دسترسی پیدا کرد؟
دهانههای ورودی این غارهای قمری اغلب دارای شیبهای تند، زمینهای ناهموار، سنگهای بزرگ و لایههایی از رگولیت سست (خاک ماه) هستند. در مأموریتهای اکتشافی ماه، معمولاً از مریخنوردها و ماهنوردهای کوچک استفاده میشود، زیرا میتوان تعداد زیادی از آنها را بهطور همزمان اعزام کرد. این رویکرد ریسک مأموریت را کاهش میدهد: اگر یکی از رباتها از کار بیفتد، سایرین همچنان میتوانند به مأموریت ادامه دهند. در مقابل، استفاده از یک ربات بزرگ به این معناست که یک خرابی کوچک میتواند کل مأموریت را به شکست بکشاند.
اما این راهبرد یک محدودیت اساسی دارد. چرخهای کوچک این رباتها ذاتاً نمیتوانند از موانعی بزرگتر از قطر خود عبور کنند. در نتیجه، صخرهها، شکافها و شیبهای تند در اطراف دهانه غارهای ماه، عملاً دسترسی رباتهای کوچک را غیرممکن میکند. اینجاست که تضاد اصلی شکل میگیرد:
رباتهای کوچک امنترند، اما توان عبور از موانع را ندارند؛ رباتهای بزرگ توانمندترند، اما ریسک مأموریت را بهشدت افزایش میدهند.
در سالهای اخیر، ایدهای نوآورانه در اکتشافات قمری مطرح شده است: چرخهایی با قطر متغیر. این چرخها میتوانند در صورت نیاز باز شده و بزرگ شوند تا از موانع عبور کنند و سپس دوباره جمع شوند تا حرکت کارآمد و کممصرفتری داشته باشند. در نگاه اول، این راهحل بسیار هوشمندانه به نظر میرسد؛ اما اجرای آن در محیط خشن ماه، کار سادهای نیست.
ماه محیطی بهشدت دشمن سیستمهای مکانیکی است. گردوغبار بسیار ریز و ساینده ماه بهراحتی به همهجا نفوذ میکند و باعث فرسایش قطعات متحرک میشود. از سوی دیگر، در خلأ کامل ماه، سطوح فلزیِ بدون محافظ میتوانند به پدیدهای به نام جوشخوردگی سرد دچار شوند؛ فرآیندی که در آن فلزات بدون حرارت به یکدیگر میچسبند. به همین دلیل، لولـاها، مفصلها و اتصالات مکانیکی سنتی در چنین محیطی دوام چندانی ندارند و خیلی زود از کار میافتند.
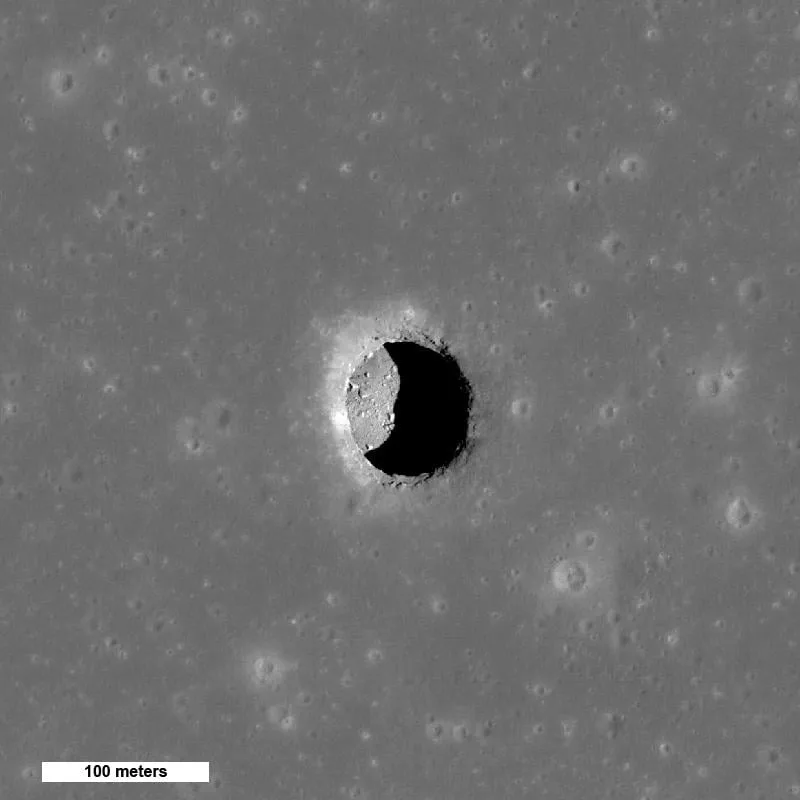
(اعتبار تصویر: ناسا / مرکز پروازهای فضایی گادرد / دانشگاه ایالتی آریزونا)
در مواجهه با این بنبست فنی، یک تیم پژوهشی به سرپرستی پروفسور دائهیونگ لی از مؤسسه پیشرفته علم و فناوری کره (KAIST) تصمیم گرفت بهجای نگاه به آینده، به گذشته رجوع کند. آنها با الهام از طرحهای پل خودنگهدار لئوناردو داوینچی و همچنین الگوهای تاخوردگی اوریگامی، راهحلی خلاقانه ارائه دادند: چرخی که بدون استفاده از مفصلهای مکانیکی سنتی، بتواند تغییر شکل دهد.
چرخ طراحیشده توسط این تیم از یک قاب فلزی کشسان و مهارکنندههای پارچهای تحت کشش تشکیل شده است. این اجزا بهجای چرخش حول محور یا لولا، با خمشدن و انعطافپذیری تغییر شکل میدهند. نتیجه، سیستمی است که میتواند بدون اتکا به قطعات مکانیکی آسیبپذیر، بهطور قابلاعتماد باز و بسته شود.
این چرخ نوآورانه قادر است قطر خود را از ۲۳۰ میلیمتر در حالت جمعشده به ۵۰۰ میلیمتر در حالت بازشده افزایش دهد؛ یعنی بیش از دو برابر. به این ترتیب، یک ماهنورد کوچک هنگام حملونقل، ابعادی جمعوجور و کمخطر دارد، اما پس از استقرار روی سطح ماه، توانایی عبور از موانعی را پیدا میکند که پیشتر تنها از عهده رباتهای بزرگ برمیآمد.
برای ارزیابی عملکرد این چرخ، تیم پژوهشی آزمایشهای سختگیرانهای را با استفاده از خاک شبیهسازیشده ماه انجام داد. نتایج نشان داد که این چرخ در شیبهای سست، چسبندگی و کشش بسیار بهتری نسبت به چرخهای معمولی دارد. همچنین، این سامانه توانست ضربهای معادل سقوط از ارتفاع ۱۰۰ متری در گرانش ماه را تحمل کند؛ آزمایشی که استحکام و انعطافپذیری همزمان قاب فلزی را بهخوبی نشان میدهد.
قاب فلزی چرخ به اندازهای انعطافپذیر است که بتواند بارها تغییر شکل دهد، و در عین حال آنقدر صلب هست که وزن ربات را روی رگولیت سست ماه بهطور ایمن تحمل کند. این تعادل میان انعطاف و استحکام، یکی از نقاط قوت کلیدی این فناوری به شمار میرود.

(اعتبار تصویر: ناسا)
دکتر چهکیونگ سیم از مؤسسه اخترشناسی و علوم فضایی کره، با تأکید بر اهمیت علمی این دستاورد، گودالهای ماه را «میراثهای زمینشناسی طبیعی» توصیف میکند؛ ساختارهایی که اکنون با کمک این فناوری نوین، بیش از هر زمان دیگری در دسترس پژوهشگران قرار گرفتهاند.
از سوی دیگر، دکتر جونگته جانگ از مؤسسه تحقیقات هوافضای کره اشاره میکند که طراحی این چرخ با استفاده از مدلهای حرارتی بهینهسازی شده است تا بتواند نوسانهای دمایی شدید ماه — تا حدود ۳۰۰ درجه سانتیگراد اختلاف بین شب و روز قمری — را تحمل کند.
در نهایت، پروفسور لی با وجود اذعان به چالشهای باقیمانده در زمینه سامانههای ارتباطی و تأمین انرژی، نسبت به آینده این فناوری ابراز خوشبینی میکند. به گفته او، این چرخ منحصربهفرد میتواند جایگاه تیمش را بهعنوان یکی از پیشگامان مأموریتهای آینده اکتشاف ماه تثبیت کند؛ مأموریتهایی که هدف آنها نفوذ به مرز ناشناخته و اسرارآمیز دنیای زیرزمینی ماه است.