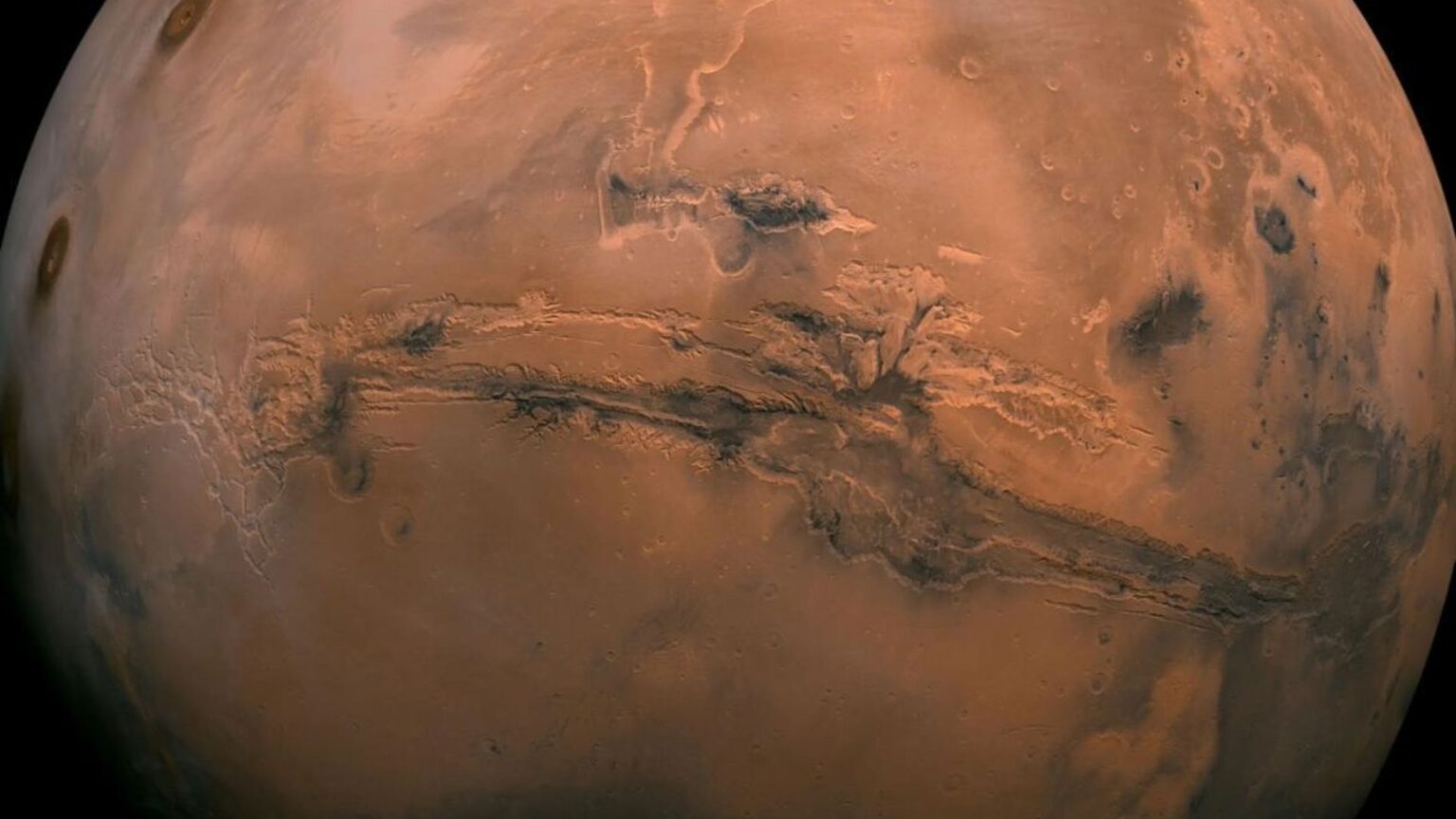
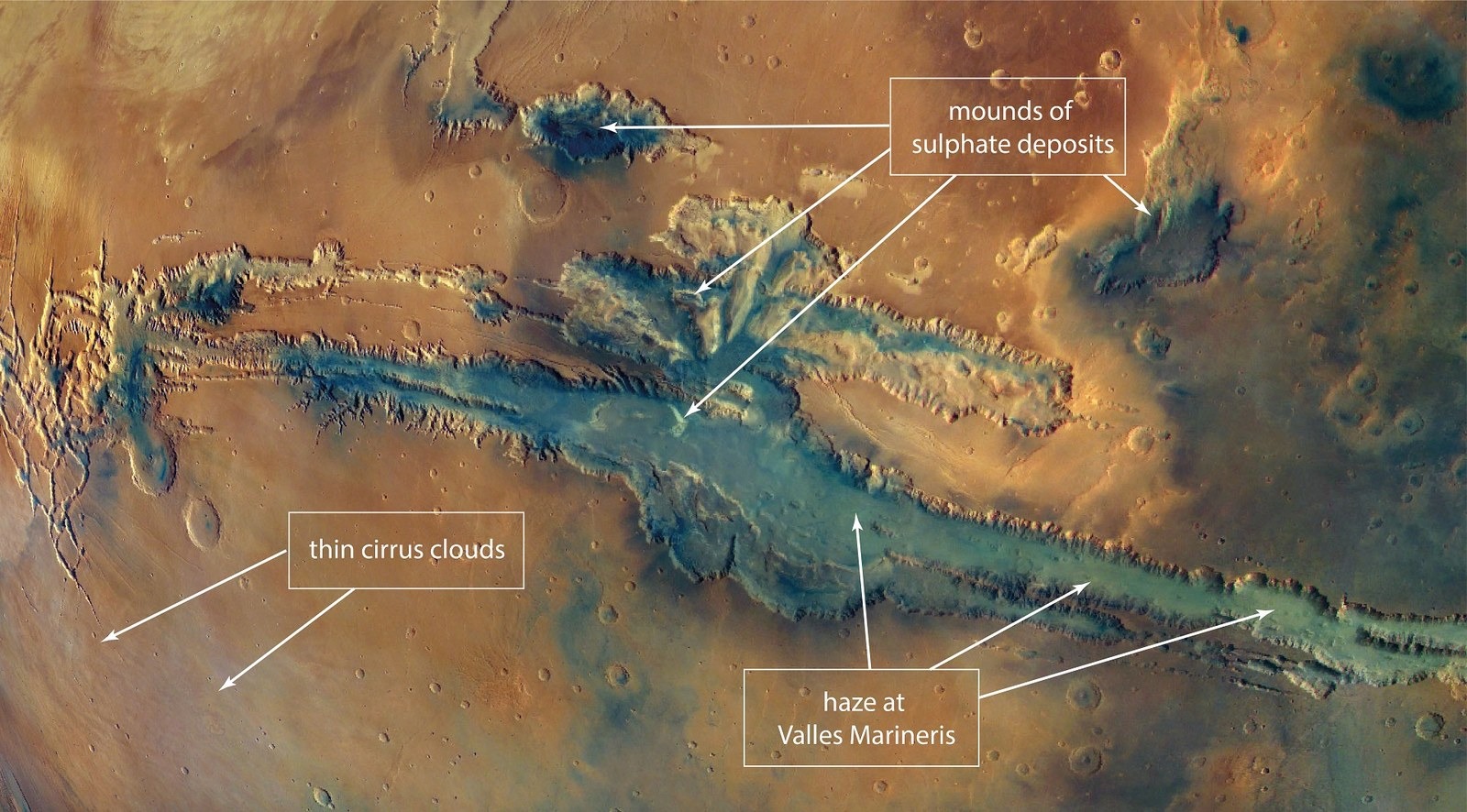
مریخ به دلیل ویژگی های زمین شناسی منحصر به فرد خود شناخته شده است. المپوس مونس یک آتشفشان سپر عظیم است که ۲.۵ برابر بلندتر از کوه اورست است. Hellas Planitia بزرگترین دهانه برخوردی قابل مشاهده در منظومه شمسی است. با این حال، برجسته ترین ویژگی مریخ Valles Marineris است، بزرگترین دره در منظومه شمسی.
این ویژگی زمینشناسی شگفتانگیز نیاز به کاوش دارد و تیمی از محققان آلمانی فکر میکنند که گروهی از روباتها برای این کار مناسب هستند.
Valles Marineris (VM) به افتخار فضاپیمای مارینر ۹ ناسا که این دره عظیم را در سال ۱۳۴۹ کشف کرد، نامگذاری شده است. طول آن حدود ۴۰۰۰ کیلومتر، عمق آن در عمیق ترین نقطه آن ۸ کیلومتر و در برخی نقاط ۶۰۰ کیلومتر عرض دارد. این اندازهگیریها گراند کنیون در ایالات متحده را کوتوله میکند.
از دور، VM مانند یک دلمه روی سطح مریخ به نظر می رسد. این شبکه به هم پیوسته ای از شکاف ها، گسل ها، دره ها و احتمالاً غارها است. برخلاف گرند کانیون، VM توسط یک رودخانه جاری حفاری نشده است. در عوض، دانشمندان فکر میکنند که احتمالاً توسط گسلهای شکاف تشکیل شده است، مناطقی روی سطح که صفحات از یکدیگر دور میشوند.
دانشمندان آلمانی در حال توسعه راهی برای کشف این منطقه منحصر به فرد هستند. این کاوشگر Valles Marineris (VaMEx) نام دارد و ایده آن به چندین سال قبل برمی گردد. VaMEx ابتکار مرکز هوافضای آلمان (DLR) است و پیشرفت چشمگیری دارد.
مریخ نوردهای ناسا پیشرفت زیادی در شناخت مریخ و گذشته بالقوه قابل سکونت آن داشته اند. آنها ماشین های باورنکردنی هستند که خلاقیت بشریت را به نمایش می گذارند. اما آنها برای زمین های ناهموار و پر از موانع مانند Valles Mariners مناسب نیستند. به جای ساخت یک وسیله نقلیه روباتیک، VaMEx چندین نوع وسیله نقلیه و واحدهای ثابت خواهد ساخت که با هم کار می کنند تا VM و شکاف ها، دیواره های دره و غارهای آن را کشف کنند.
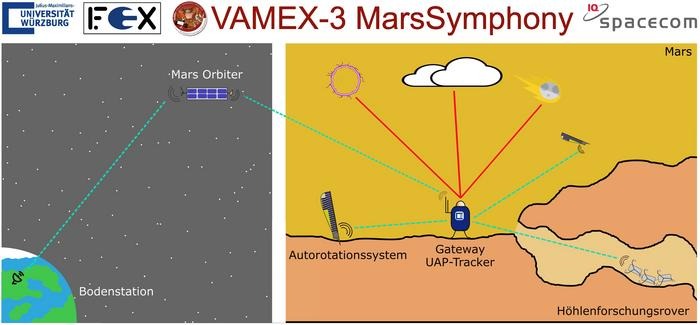
VaMEx انبوهی از وسایل نقلیه به هم پیوسته خواهد بود که پرواز می کنند، روی زمین حرکت می کنند و از غارها در VM بازدید می کنند. آنها با یک ایستگاه زمینی که به عنوان مرکز فرماندهی عمل می کند مرتبط خواهند شد و یک ماهواره ارتباط با زمین را فراهم می کند. این خودروها تصاویر و داده ها را جمع آوری کرده و به مرکز فرماندهی و مدارگرد یا ماهواره و سپس به زمین ارسال می کنند.
VaMEx به ویژه غارهایی را هدف قرار داده است که دانشمندان فکر می کنند احتمالاً در VM فراوان هستند. غارها از تشعشعات محافظت می شوند و اگر مریخ در گذشته میزبان حیات ساده بود، ممکن است آثاری از آن در اعماق این غارها وجود داشته باشد. VaMEx همچنین شامل ایستگاه های تکرار کننده زمینی است که به ربات های کاوشگر غار اجازه می دهد داده ها و تصاویر را در زمان واقعی به اشتراک بگذارند.
همه اینها به ارتباطات دقیق نیاز دارند.
پروفسور هاکان کایال، سرپرست پروژه، گفت: «ما به پروژه فرعی خود نام «VaMEx3-MarsSymphony» را دادهایم زیرا هدف این است که عناصر منفرد ربات را وادار کنیم تا مانند یک ارکستر با هم هماهنگ بنوازند. کایال استاد فضانوردی در مرکز کنترل ماموریت ماهواره ای در دانشگاه وورزبورگ است.

واحدهایی به نام اجسام خودکار نیز بخشی از این گروه هستند. چرخش خودکار اصطلاحی از پرواز با بال چرخشی (بالگرد) است. وضعیتی را توصیف میکند که در آن قدرت روتورها از دست میرود، و با سقوط هلیکوپتر به سمت زمین، هوا باعث چرخش روتورها میشود و انرژی کافی برای فرود کنترلشده فراهم میکند. بدنههای چرخش خودکار VaMEx هلیکوپتر نیستند. آنها مانند دانه های افرا هستند که به آرامی روی زمین شناور می شوند و در هنگام پایین آمدن می چرخند. پس از رسیدن به سطح، ساکن هستند.
VaMEx نیز رویکرد غیرمعمولی برای دوربین ها در پیش گرفته است. ایستگاه زمینی ثابت دارای دوربینی است که آسمان مریخ را رصد می کند. هاکان کایال میگوید: «تمام مأموریتهای قبلی مریخ روی سطح سیاره متمرکز شدهاند، اما ما میخواهیم برای اولین بار به سمت بالا نگاه کنیم. این دوربین می تواند تشکیل ابر و گرد و غبار موجود در جو را کنترل کند. همچنین هر پدیده گذرا مانند نور غیر معمول ابر یا رعد و برق را ضبط می کند.
مریخ نوردهای ناسا گاهی اوقات از آسمان مریخ تصویربرداری کرده اند. گیف زیر مربوط به مریخ نورد Perseverance است که از یکی از دوربین های ناوبری خود برای ثبت تصاویر استفاده کرده است. یک دوربین نظارت بر آسمان که به طور هدفمند ساخته شده است، آسمان مریخ را مانند قبل تصویر می کند.
از طریق GIPHY
همچنین شهاب های ورودی را مشاهده خواهد کرد و داده ها نشان می دهد که هر روز یک شهاب به اندازه یک توپ بسکتبال به مریخ برخورد می کند. هاکان کایال میگوید: اگر از ورود شهابسنگها با دوربین UAP خود فیلمبرداری کنیم و این رویدادها را با سیگنالهای لرزهای مرتبط کنیم، میتوانیم این را با دادهها ثابت کنیم.
VaMEx با چالش های فنی زیادی روبرو است که هنوز باید بر آنها غلبه کرد. رباتهای متحرک برای مانور در زمینهای دشوار، بهویژه در غارها، به هوش مصنوعی مسیریابی قدرتمند نیاز دارند. حدود ۴۰ دقیقه طول می کشد تا یک سیگنال از مریخ و برگردد و کنترل از راه دور را غیرممکن می کند.
چالش های ارتباطی نیز وجود دارد. یک چالش کلیدی این است که بخش های زمینی VaMEx با یک ماهواره ارتباط برقرار کنند. یک شرکت در حال کار بر روی فرستنده گیرنده های ویژه ای است که در باند Ka کار می کنند تا همه داده های علمی را مدیریت کنند. باند Ka در ماهواره ها استفاده می شود زیرا امکان ارتباطات با پهنای باند بالاتر را فراهم می کند، اما فرودگرها در حال حاضر از باند S یا X استفاده می کنند. مسئله این است که Ka-band معمولاً به تجهیزات بیشتر و حجیمتری از جمله آنتنهای بزرگتر نیاز دارد که ممکن است روی یک ربات سطحی کاربردی نباشد.
در ماه اوت، دانشمندان برخی از جنبه های VaMEx را در سایت DLR در Oberpfaffenhofen آزمایش کردند. آنها حسگرهای LIDAR (تشخیص نور و محدوده)، IMU (واحد اندازهگیری اینرسی) و GNSS (سیستم ناوبری ماهوارهای جهانی) را برای اعتبارسنجی حقیقت زمینی آزمایش کردند. این اطلاعات حسگر را با داده های شناخته شده مقایسه کرد. آنها همچنین سیستم های ارتباطی وای فای مانند و محدوده رادیویی را با موفقیت آزمایش کردند.
وب سایت VaMEx می گوید: یکی از نکات برجسته آزمایش میدانی ما، آزمایش زنده SLAM چند روباتی (محلی سازی و نقشه برداری همزمان) بود. در یک سناریوی ربات دوگانه، ما قابلیتهای بلادرنگ الگوریتمهای SLAM خود را آزمایش کردیم. آنها می گویند که نتایج امیدوارکننده بوده و راهی را برای همکاری روبات های فردی نشان می دهد.

با این حال همه چیز در تست ها خوب پیش نرفت. Robot Operating System 2 (ROS2) با بسیاری از واحدها که سعی در برقراری ارتباط با یکدیگر داشتند، با چالش هایی مواجه شد. پهنای باند و همگام سازی هر دو مشکل ساز بودند.
این نتایج به تیم VaMEx کمک میکند تا برای آزمایشهای آنالوگ آتی در سال ۲۰۲۵ آماده شود. این آزمایشها در معدنی در آلمان انجام میشود، جایی که پس از پیشرفتهای حاصل از آزمایشهای آگوست، گروه رباتها آزمایش خواهند شد. دوربین Skycam Wurzburg UAP (پدیدههای هوایی ناشناس) بخشی از این آزمایشها خواهد بود، با دادههای ویدیویی تشنهی منابع آن برای آزمایش استحکام کلی سیستم به ترکیب اضافه میشود.

اگر همه چیز خوب پیش رفت، مرحله بعدی سخت کردن تجهیزات VaMEx است. مریخ شرایط بسیار سخت تری دارد، با دمای بسیار پایین تر، جو نازک و طوفان های گرد و غبار جهانی که می تواند اکتشاف را مختل کند.
هاکان کایال توضیح میدهد: در یک پروژه بعدی احتمالی، سختافزار باید برای استفاده در مریخ تطبیق داده شود.