مریخنوردهای رباتیک به زودی بر روی ماه فعالیت خواهند کرد. اپراتورهای انسانی که بر روی زمین مستقر هستند، میتوانند ابزارهای مریخنوردها را بهصورت مجازی کنترل کرده و در مهارتهای خود در زمینه نمونهبرداری، حفاری یا مونتاژ بهبود یابند.
محققان آزمایشگاه روباتیک دانشگاه بریستول در انگلستان، سیستم جدید عملیات از راه دور خود را در مرکز برنامههای فضایی آژانس فضایی اروپا (ESA) آزمایش کردند. آنها توانستند با کنترل شبیهسازی یک مریخنورد، نمونهای از سنگ قمری را که بهعنوان شبیهساز عمل میکرد، حفاری کنند. این روش میتواند مشکلات ناشی از تأخیر ۱.۳ ثانیهای سیگنال بین زمین و ماه را کاهش دهد. سیگنالها از طریق ماهوارههای پروژه مهتاب ESA ارسال میشوند.
جو لوکا از دانشگاه بریستول در بیانیهای گفت: «این شبیهسازی به ما کمک میکند تا رباتهای قمری را از راه دور کنترل کنیم و از مشکلات تأخیر سیگنال جلوگیری کنیم.»
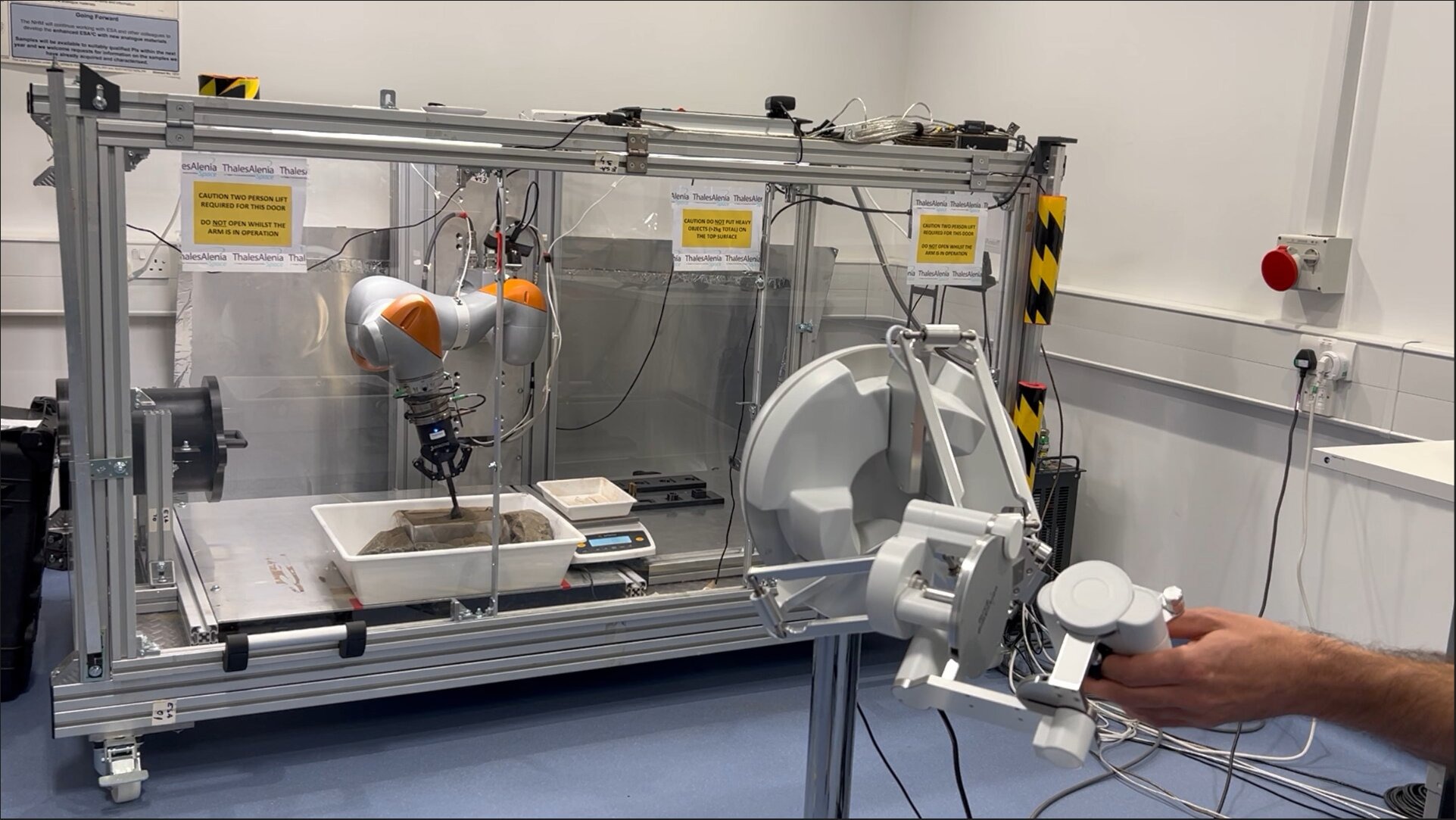
این شبیهسازی همچنین شامل تعاملات «هپتیک» است که حس لامسه را به اپراتور منتقل میکند و ویژگیهای لمسی سنگ قمری را در گرانش کم ماه شبیهسازی میکند. این امکان به اپراتورها کمک میکند تا نیروی مورد نیاز برای حفاری یا بلند کردن نمونهها را احساس کنند. تا کنون، تعاملات لمسی فقط در کارهای اصلی مانند فشار دادن سنگلایت به زمین یا کشیدن یک اسکوپ گنجانده شده است، اما برای کارهای پیچیدهتر هنوز توسعه نیافته است.
لوکا میگوید: «ما میتوانیم قدرت گرانش را در این مدل تنظیم کنیم و بازخورد لمسی ارائه دهیم تا فضانوردان حس کنند که غبار ماه در شرایط مختلف چه حسی دارد و چگونه رفتار میکند.»
این سیستم همچنین میتواند به آموزش فضانوردانی که ممکن است روزی به ماه بروند، کمک کند و شبیهسازی واقعگرایانهای از آنچه که باید انتظار داشته باشند، ارائه دهد.
لوکا اضافه کرد: «فضانوردان میتوانند از این شبیهسازی برای آمادهسازی برای مأموریتهای اکتشافی آینده استفاده کنند.»
با این حال، لوکا تأکید میکند که باید بر مشکلات اعتماد غلبه کرد. مطالعات قبلی نشان دادهاند که موانع روانشناختی میتوانند بر اطمینان کاربران نسبت به عملکرد واقعی سیستم مجازی تأثیر بگذارند.
تیم لوکا کارایی و قابلیت اطمینان سیستم مجازی خود را اندازهگیری کرده و دریافتهاند که هنگام جستجوی شبیهساز رگولیت، این سیستم در ۱۰۰٪ مواقع کارآمد و در ۹۲.۵٪ موارد قابل اعتماد بوده است. همچنین ریختن شبیهساز از اسکوپ کمی کمتر قابل اعتماد بود، اما با محدود کردن جهت حرکت شبیهساز در حین حمل، دقت بیشتری به دست آمد.

اگرچه این سیستم برای ماه طراحی شده است، اما میتوان از همین تکنیکهای دور عملیاتی برای مأموریتهای مریخ نیز استفاده کرد. این فناوری میتواند به ویژه در کارهای چالشبرانگیز مانند بازیابی لولههای نمونه از یک مریخنورد و بارگذاری آنها بر روی وسیله نقلیه دیگری که نمونهها را به زمین بازمیگرداند، مفید باشد.
با توجه به چالشهای پروژه کنونی بازگشت نمونه مریخ ناسا، آژانس فضایی از صنعت درخواست کمک برای توسعه راهحلهای جدید کرده است. شرکت Rocket Lab اخیراً قراردادی را برای انجام مطالعهای دقیق در مورد راهحلهای ممکن برای بازیابی نمونههای مریخنورد Perseverance به دست آورده است. با این حال، ممکن است برای ایفای نقش از راه دور هنوز زود باشد. اما سایر مأموریتهای بازگشت نمونه و اکتشاف به ماه، مریخ و دیگر اجرام سنگی ممکن است از فناوریهای دور عملیاتی در آینده بهرهمند شوند.
لوکا در پایان گفت: «در دهه آینده، شاهد چندین مأموریت خدمه و بدون خدمه به ماه خواهیم بود، از جمله برنامه Artemis ناسا و برنامه Chang’e چین. این شبیهسازی میتواند ابزاری ارزشمند برای پشتیبانی از آمادهسازی یا عملیات این مأموریتها باشد.»
سوالات متداول
۱. مأموریتهای فضایی چه اهدافی دارند؟
مأموریتهای فضایی به دنبال اکتشاف و استخراج منابع از ماه و سیارات دیگر هستند.
۲. سیستم عملیاتی از راه دور چیست؟
این سیستم به اپراتورها امکان میدهد تا از زمین رباتها را کنترل کنند و با استفاده از شبیهسازی، وظایف مختلفی مانند حفاری را انجام دهند.
۳. چگونه تأخیر سیگنال بر مأموریتهای فضایی تأثیر میگذارد؟
تأخیر سیگنال میتواند بر کنترل رباتها تأثیر بگذارد و به چالشهایی در ارتباطات بین زمین و فضا منجر شود.
۴. شبیهسازیهای مجازی چه مزایایی دارند؟
شبیهسازیهای مجازی میتوانند به کاهش هزینهها و بهبود دقت در عملیات فضایی کمک کنند.
۵. این فناوری چگونه میتواند برای مأموریتهای مریخ استفاده شود؟
تکنیکهای دور عملیاتی میتوانند برای مأموریتهای مریخ و بازیابی نمونهها از مریخنوردها به کار گرفته شوند.
۶. تعاملات هپتیک چه کمکی به اپراتورها میکند؟
تعاملات هپتیک حس لامسه را به اپراتورها منتقل کرده و به آنها کمک میکند تا نیروی لازم برای انجام کارها را احساس کنند.