مأموریتهای فضایی با ایجاد زیرساختهای دائمی در ماه، مانند زیستگاهها، با استفاده از منابع محلی به اوج خود میرسند. استفاده از منابع درجا (ISRU) شامل سنگهای قمر است که رباتهای مجهز به فناوری چاپ سهبعدی از آنها برای تولید مصالح ساختمانی استفاده میکنند. این عملیاتها از پیشرفتهای کنترل رباتها از زمین بهره میبرند، به طوری که کنترلکنندهها میتوانند رباتها را از راه دور در سطح ماه هدایت کنند.
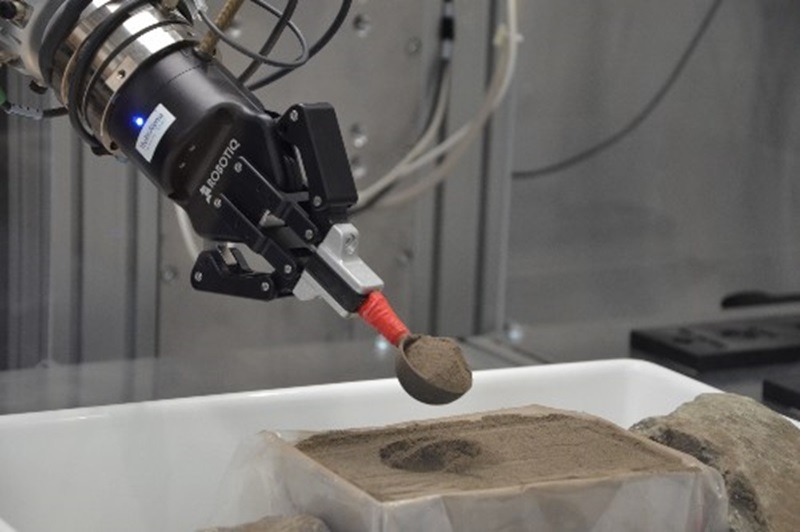
طبق تحقیقات جدید دانشمندان دانشگاه بریستول، این فناوری به تحقق نزدیکتر شده است. با استفاده از شبیهسازی مجازی، تیم تحقیقاتی یک مأموریت جمعآوری نمونه را تکمیل کرده و دستوراتی برای ربات ارسال کردند که اقدامات شبیهسازی را در دنیای واقعی انجام میداد. در عین حال، تیم بدون نیاز به پخش مستقیم دوربین، که ممکن است دچار تاخیر ارتباطی در ماه شود، شبیهسازی را تحت نظر داشتند. این پروژه به خوبی نشان داد که روش تیم برای عملیاتهای دور در سطح ماه مناسب است.
به عنوان بخشی از برنامه آرتمیس ناسا، دهکده ماه ESA و برنامه اکتشاف ماه چین (Chang’e)، آژانسهای فضایی، مؤسسات تحقیقاتی و شرکتهای فضایی تجاری در حال تحقیق در مورد نحوه استخراج منابع ارزشمند از سنگهای ماه (غبار ماه) هستند. این منابع شامل آب و اکسیژن است که میتوانند نیازهای اولیه فضانوردان را تأمین کرده و برای تولید هیدروژن مایع و پیشرانه اکسیژن استفاده شوند. کنترل از راه دور سنگها برای این فعالیتها بسیار ضروری است، زیرا گرد و غبار ماه ساینده و باردار الکترواستاتیکی است و کنترل آن دشوار است.
این تیم متشکل از محققان دانشکده مهندسی، ریاضیات و فناوری دانشگاه بریستول بود که این آزمایش را در مرکز اروپایی کاربردهای فضایی و ارتباطات از راه دور آژانس فضایی اروپا (ESA-ESCAT) در هارول، بریتانیا انجام دادند. نتایج این آزمایش در کنفرانس بینالمللی رباتها و سیستمهای هوشمند ۲۰۲۴ (IROS 2024) در دبی ارائه شد و در مجله تحقیقاتی که توسط موسسه مهندسین برق و الکترونیک (IEEE) منتشر شده است، منتشر گردید.
جو لوکا، نویسنده اصلی و دکترای فلسفه در دانشکده ریاضیات و فناوری مهندسی بریستول، توضیح میدهد:
یکی از گزینهها این است که فضانوردان از این شبیهسازی برای آمادهسازی مأموریتهای اکتشاف ماه آینده استفاده کنند. ما میتوانیم قدرت گرانش را در این مدل تنظیم کرده و بازخورد لمسی ارائه دهیم، به این ترتیب فضانوردان میتوانند حس کنند که غبار ماه در شرایط قمری چه احساسی دارد و چگونه رفتار میکند – که یک ششم کشش گرانشی زمین را دارد. این شبیهسازی همچنین میتواند به ما کمک کند تا رباتهای قمری را از راه دور از زمین کنترل کنیم و از مشکلات تاخیر سیگنال جلوگیری نماییم.
مدل مجازی که این تیم ایجاد کرده است، میتواند هزینههای مرتبط با توسعه رباتهای قمری را برای مؤسسات و شرکتهایی که در حال تحقیق در مورد این فناوری هستند، کاهش دهد. به طور سنتی، آزمایشهای مرتبط با ساخت ماه نیازمند ایجاد شبیهسازهایی با ویژگیهای مشابه سنگهای قمر و دسترسی به امکانات پیشرفته است. اما با استفاده از این شبیهسازی، توسعهدهندگان میتوانند تستهای اولیه را بدون پرداخت هزینههای گزاف انجام دهند.

با نگاهی به آینده، تیم قصد دارد موانع غیر فنی بالقوه این فناوری را بررسی کند. این شامل نحوه تعامل افراد با این سیستم میشود، جایی که ارتباطات با تاخیر ۵ تا ۱۴ ثانیهای مواجه خواهد شد. این مسئله در مأموریتهای آرتمیس مورد انتظار است، در حالی که مأموریتهای آپولو تنها با تاخیر ۳ ثانیهای در شبکه فضایی عمیق (DSN) مواجه بودند. لوکا میگوید:
این مدل قادر است نتایج شبیهسازی سنگلیت را با دقت پیشبینی کند به طوری که در ۱۰۰% و ۹۲.۵% مواقع موثر و قابل اعتماد در نظر گرفته شود. در دهه آینده، ما شاهد چندین مأموریت خدمه و بدون خدمه به ماه خواهیم بود، از جمله برنامه آرتمیس ناسا و برنامه Chang’e چین. این شبیهسازی میتواند ابزاری ارزشمند برای پشتیبانی از آمادهسازی یا عملیات برای این مأموریتها باشد.
سوالات متداول
۱. مأموریتهای فضایی چه اهدافی دارند؟
مأموریتهای فضایی به دنبال اکتشاف و استخراج منابع ارزشمند از ماه و سایر سیارات هستند.
۲. فناوری ISRU چیست؟
فناوری ISRU به معنای استفاده از منابع محلی در محیطهای فضایی است که شامل استخراج و استفاده از سنگهای قمر میشود.
۳. چگونه رباتها در مأموریتهای فضایی کنترل میشوند؟
رباتها از راه دور توسط کنترلکنندههایی که بر روی زمین هستند، هدایت میشوند.
۴. تأخیر ارتباطی در مأموریتهای فضایی چه تأثیری دارد؟
تأخیر ارتباطی میتواند بر کنترل و هدایت رباتها تأثیر بگذارد و باید در طراحی مأموریتها مد نظر قرار گیرد.
۵. شبیهسازیهای مجازی چگونه به توسعه فناوری کمک میکنند؟
شبیهسازیهای مجازی به کاهش هزینهها و انجام تستهای اولیه بدون نیاز به امکانات پیشرفته کمک میکنند.