این پرسشی است که مطالعهای جدید، ارائهشده در پنجاهوششمین کنفرانس علوم قمری و سیارهای (LPSC)، تلاش دارد به آن پاسخ دهد. در این پژوهش، تیمی از دانشگاه کالیفرنیای جنوبی (USC) مزایای استفاده از رباتهای پادار در اکتشافات ماه را با تمرکز بر سرعت گامبرداری بررسی کردهاند. یافتههای این تحقیق میتواند به مهندسان، دانشمندان، برنامهریزان مأموریت و فضانوردان کمک کند تا طراحیهای نوینی از رباتهای اکتشافی توسعه دهند که بتوانند اهداف علمی و مأموریتی آینده روی سطح ماه را با کارایی بیشتری محقق کنند.
در اینجا گفتوگویی با دکتر فیفی چیان، استادیار و پژوهشگر ارشد آزمایشگاه «پویایی حرکت و ناوبری رباتها (RoboLAND)» در دانشکده مهندسی ویتربی دانشگاه USC و یکی از نویسندگان این مطالعه، درباره انگیزه انجام این پژوهش، نتایج کلیدی، گامهای بعدی برای تحقق رباتهای پیادهروی ماه و نقش آنها در برنامه آرتمیس ناسا ارائه شده است.
انگیزه انجام این مطالعه چه بود؟
دکتر چیان میگوید:
«با آماده شدن برای اکتشاف در ماه، مریخ و فراتر از آن، میخواهیم رباتهایمان بتوانند روی سطوح دشوار سیارات — که معمولاً شامل شن نرم، شیبهای تند و سنگهای ناهموار است — بهخوبی حرکت کنند. رباتهای چهارپای پیادهرو که شبیه سگ طراحی شدهاند، مانند ما انسانها موجوداتی پادار هستند و قابلیت دسترسی به چشماندازهای چالشبرانگیزتری را دارند. هدف ما توسعه فناوریهایی است که به رباتهای پادار آینده امکان تحرک بهتر و توانایی حسگری بیشتر را بدهد تا بتوانیم سیارات را با دقت بیشتری اکتشاف کنیم.»
در این مطالعه چه شد؟
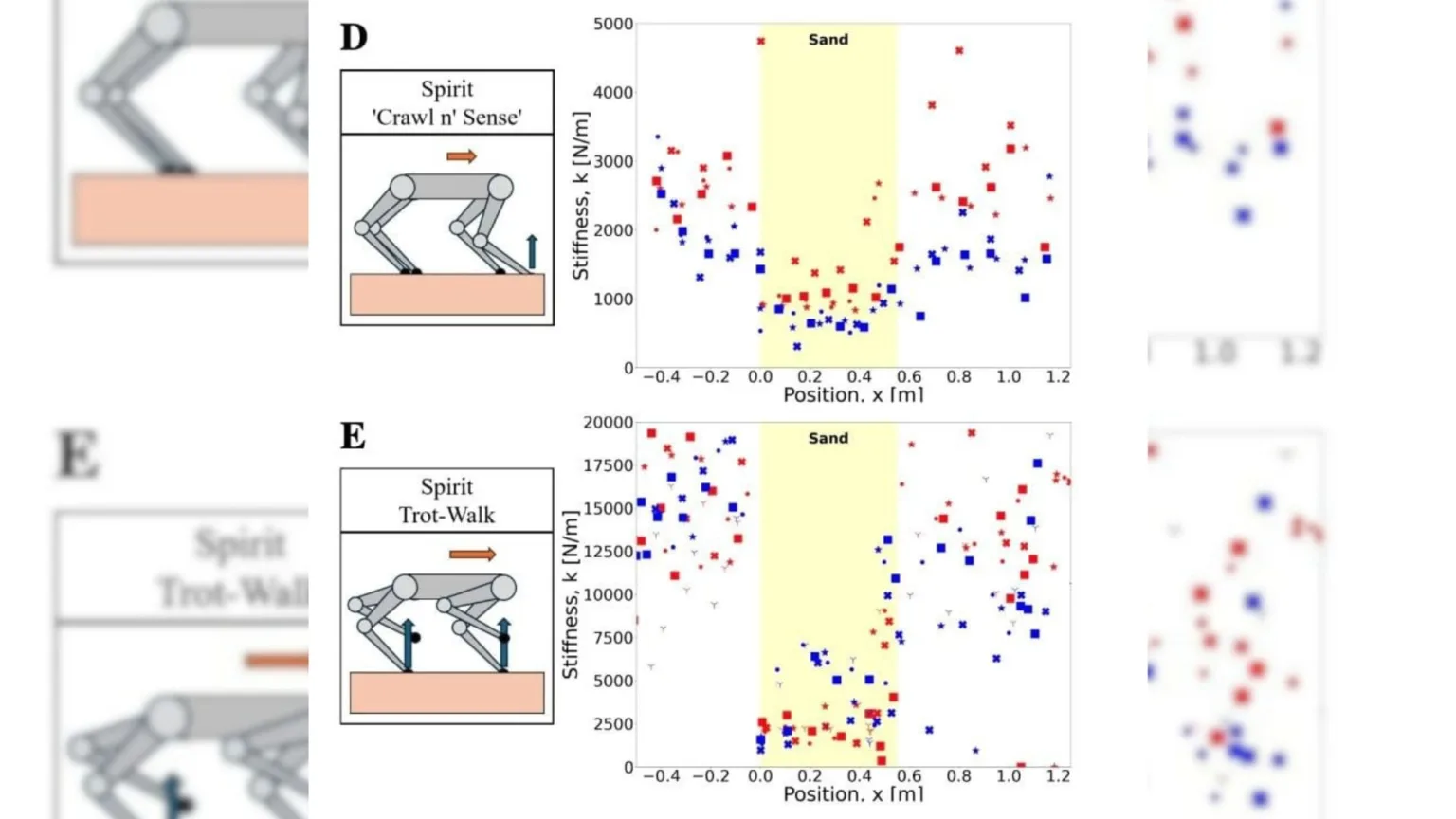
پژوهشگران دو نوع الگوی حرکتی را روی دو نوع شن برای رباتهای چهارپای خود بررسی کردند: یکی به نام Crawl-N-Sense با حرکت آهسته و دیگری Trot Walk با حرکت سریعتر. در مدل Crawl-N-Sense، ربات یک پا را حرکت داده و از سه پای دیگر برای حس کردن زمین و حفظ تعادل استفاده میکرد، در حالی که Trot Walk بهصورت مورب دو پا را همزمان حرکت میداد — الگویی شبیه ربات Spirit 40 از شرکت Ghost Robotics که در شبکههای اجتماعی دیده میشود.
این دو ربات روی دو نوع بستر شنی آزمایش شدند: شن همگن (نرم و یکنواخت) و شن ناهمگن (با پوسته سخت در سطح). شن همگن برای ارزیابی میزان فرو رفتن پاها در سطح، و شن ناهمگن برای سنجش مقاومت بستر استفاده شد.
مهمترین نتایج این مطالعه چه بود؟
دکتر چیان میگوید:
«مهمترین دستاورد این بود که نشان دادیم رباتهای سگمانند میتوانند هنگام راه رفتن، ویژگیهای سطح سیاره را با پاهای خود اندازهگیری کنند. همانطور که انسانها و حیوانات قادر به ‘حس کردن’ زمین زیر پاهای خود هستند و نحوه راه رفتن خود را بر آن اساس تنظیم میکنند، اگر بتوانیم این توانایی را به رباتها نیز بیاموزیم، آنها خواهند توانست حرکت خود را با توجه به نرمی یا سختی خاک تطبیق دهند و از گیر افتادن در شنهای نرم — مانند آنچه برای برخی مریخنوردها پیش آمد — جلوگیری کنند.
علاوه بر این، رباتها ممکن است حتی بتوانند نشانههایی از یخ آب در ماه را تنها با قدم زدن روی آن کشف کنند! این امر میتواند راهی مؤثر برای یافتن ردهایی از آب یا سایر دادههای علمی مهم باشد.»
گام بعدی برای تحقق رباتهای پیادهروی ماه چیست؟
دکتر چیان توضیح میدهد:
«یکی از گامهای کلیدی، آموزش به ربات برای درک نیروهایی است که از طریق پاهایش حس میکند تا بتواند آنها را شناسایی کرده و به ما گزارش دهد. گام مهم دیگر، یافتن استراتژیهای مناسب برای حرکت در انواع زمینهای چالشبرانگیز است. ما میتوانیم این آموزش را با مواد شبیهسازیشده خاک ماه یا مریخ در آزمایشگاه و در محیطهای طبیعی انجام دهیم. تاکنون، رباتها را به مکانهایی چون بیابان White Sands در نیومکزیکو (شبیهساز مریخ) و کوه آتشفشانی یخی Mt Hood در اورگان (شبیهساز ماه) بردهایم.»
این رباتها چه کمکی به برنامه آرتمیس میکنند؟
همزمان با آمادهسازی ناسا برای بازگرداندن انسان به ماه — برای اولین بار از زمان مأموریت آپولو ۱۷ در سال ۱۳۵۰ — از طریق برنامه آرتمیس، این تحقیق میتواند کاربردهای فراوانی در مأموریتهای سرنشیندار آینده داشته باشد.
دکتر چیان میگوید:
«ما با شرکت Blue Origin (شاخه Honeybee Robotics) همکاری داشتیم تا نسخه فضایی این ربات را برای رقابت در مأموریت Artemis IV توسعه دهیم! البته چالشهایی برای ارسال این ربات به فضا وجود دارد؛ مانند تأمین انرژی کافی برای حرکت طولانیمدت در مناطقی چون نواحی همواره سایهدار، و دفع حرارت. اما امیدواریم روزی این سگهای رباتیک روی ماه گشت بزنند، به اکتشاف بپردازند، یا حتی در ساخت زیستگاههای آینده ما کمک کنند!»
آینده رباتهای پادار در اکتشافات قمری
رباتهای سطحنورد، از آغاز عصر فضا، ستون اصلی مأموریتهای علمی سیارهای بودهاند و کشورهای مختلف رباتهایی را به ماه، مریخ و قمر تایتان زحل فرستادهاند. تا امروز، انتخاب میان فرودگر یا مریخنورد بر اساس اهداف علمی و مأموریتی انجام میشد؛ اما این مطالعه میتواند آغازی باشد برای حضور رباتهای پادار روی سطح دیگر اجرام آسمانی.
اینکه رباتهای پیادهرو چگونه در سالها و دهههای آینده به ارتقای علم در سطح ماه و موفقیت برنامه آرتمیس کمک میکنند، هنوز مشخص نیست — و به همین دلیل است که ما علم را ادامه میدهیم!
همیشه علم بورزید و به بالا نگاه کنید!