تلسکوپ فضایی هابل در داخل شاتل فضایی دیسکاوری به فضا منتقل شد و سپس در مدار پایین زمین رها شد. تلسکوپ فضایی جیمز وب در داخل مخروط دماغه موشک آریان ۵ فشرده شد و سپس به فضا پرتاب شد. این آینه و سایه خود را در مسیر خود به سمت خانه خود در نقطه خورشید-زمین L2 لاگرانژ مستقر کرد.
با این حال، ایستگاه فضایی بینالمللی با اجزای پرتاب شده در زمانهای مختلف در فضا مونتاژ شد. آیا می تواند الگویی برای ساخت تلسکوپ های فضایی آینده و سایر امکانات فضایی باشد؟
جهان زوایای تاریک زیادی دارد که باید به آنها نگاه کرد. به همین دلیل است که ما به سمت ساخت تلسکوپ های قدرتمندتر سوق داده شده ایم که به معنای آینه های بزرگتر است. با این حال، پرتاب آنها به فضا در داخل مخروط های دماغه موشک به طور فزاینده ای دشوار می شود. از آنجایی که ما دیگر شاتل فضایی نداریم، این ما را به یک نتیجه طبیعی می رساند: تلسکوپ های فضایی خود را با استفاده از روبات های قدرتمند در فضا جمع آوری کنیم.
تحقیقات جدید در مجله Acta Astronautica امکان استفاده از ربات های راه رفتن را برای ساخت تلسکوپ های فضایی بررسی می کند.
این تحقیق «دوران جدید دستکاریکنندگان راه رفتن در فضا: امکانسنجی و ارزیابی عملیاتی مونتاژ تلسکوپ فضایی با دیافراگم بزرگ ۲۵ متری در مدار» است. نویسنده اصلی، Manu Nair از مرکز لینکلن برای سیستم های خودمختار در بریتانیا است.
این تحقیق با توجه به هیاهوی دائمی نجوم با وضوح بالا و رصد زمین در جامعه فضایی به موقع انجام می شود و به عنوان مبنایی برای مأموریت های آینده با تلسکوپ هایی با دیافراگم بسیار بزرگتر، مأموریت هایی که نیاز به مونتاژ ایستگاه های فضایی و ماهواره های تولید انرژی خورشیدی دارند، عمل می کند. نویسندگان می نویسند تا تعدادی را فهرست کنم.
در حالی که Canadarm و بازوی رباتیک اروپایی در ایستگاه فضایی بینالمللی توانایی و کارایی خود را نشان دادهاند، محدودیتهایی دارند. آنها از راه دور توسط فضانوردان اداره می شوند و فقط توانایی راه رفتن محدودی دارند.
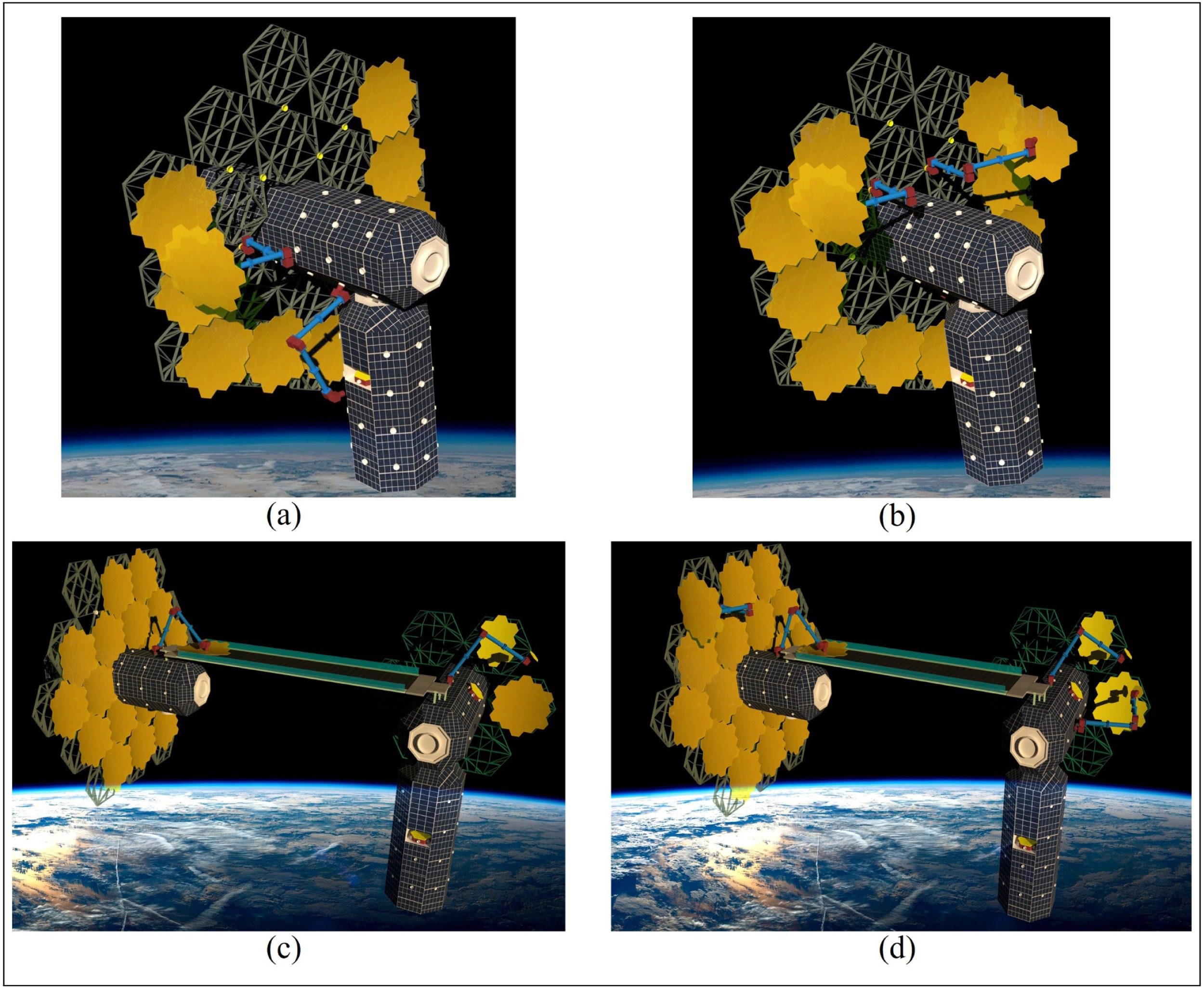
نایر و همکارانش با درک نیاز به تلسکوپهای فضایی، ایستگاههای فضایی و سایر زیرساختهای پیشرفته، در حال توسعه یک مفهوم برای یک ربات راهرو بهبودیافته هستند. برای حل محدودیتهای دستکاریکنندههای معمولی راه رفتن، این مقاله یک ربات راهرو با هفت درجه آزادی (E-Walker) را برای ماموریتهای آینده در زمینهی مونتاژ و تولید در فضا (ISAM) معرفی میکند.

رباتیک، اتوماسیون و سیستمهای خودمختار (RAAS) نقش بزرگی در آینده تلسکوپهای فضایی و سایر زیرساختها خواهند داشت. این سیستم ها به مهارت، میزان بالایی از استقلال، افزونگی و مدولار بودن نیاز دارند. کار زیادی برای ایجاد RAAS باقی مانده است که بتواند در محیط خشن فضا عمل کند. E-Walker مفهومی است که هدف آن برآوردن برخی از این الزامات است.
نویسندگان اشاره می کنند که چگونه ربات ها در محیط های صنعتی منحصر به فرد در اینجا روی زمین استفاده می شوند. Joint European Torus در حال از کار افتادن است و یک ربات چهارپا Boston Dynamics Spot برای آزمایش اثربخشی آن استفاده می شود. این هواپیما در طول آزمایشی ۳۵ روزه به طور مستقل در اطراف JET حرکت کرد و از تاسیسات نقشه برداری کرد و سنسورها را قرائت کرد، همه در حالی که از موانع و پرسنل اجتناب می کرد.

استفاده از Spot در حین خاموشی صنعتی، پتانسیل روباتهای مستقل را نشان میدهد. با این حال، روباتها هنوز راه زیادی در پیش دارند تا بتوانند تلسکوپ فضایی بسازند. مطالعه موردی نویسندگان می تواند یک گام اولیه مهم باشد.
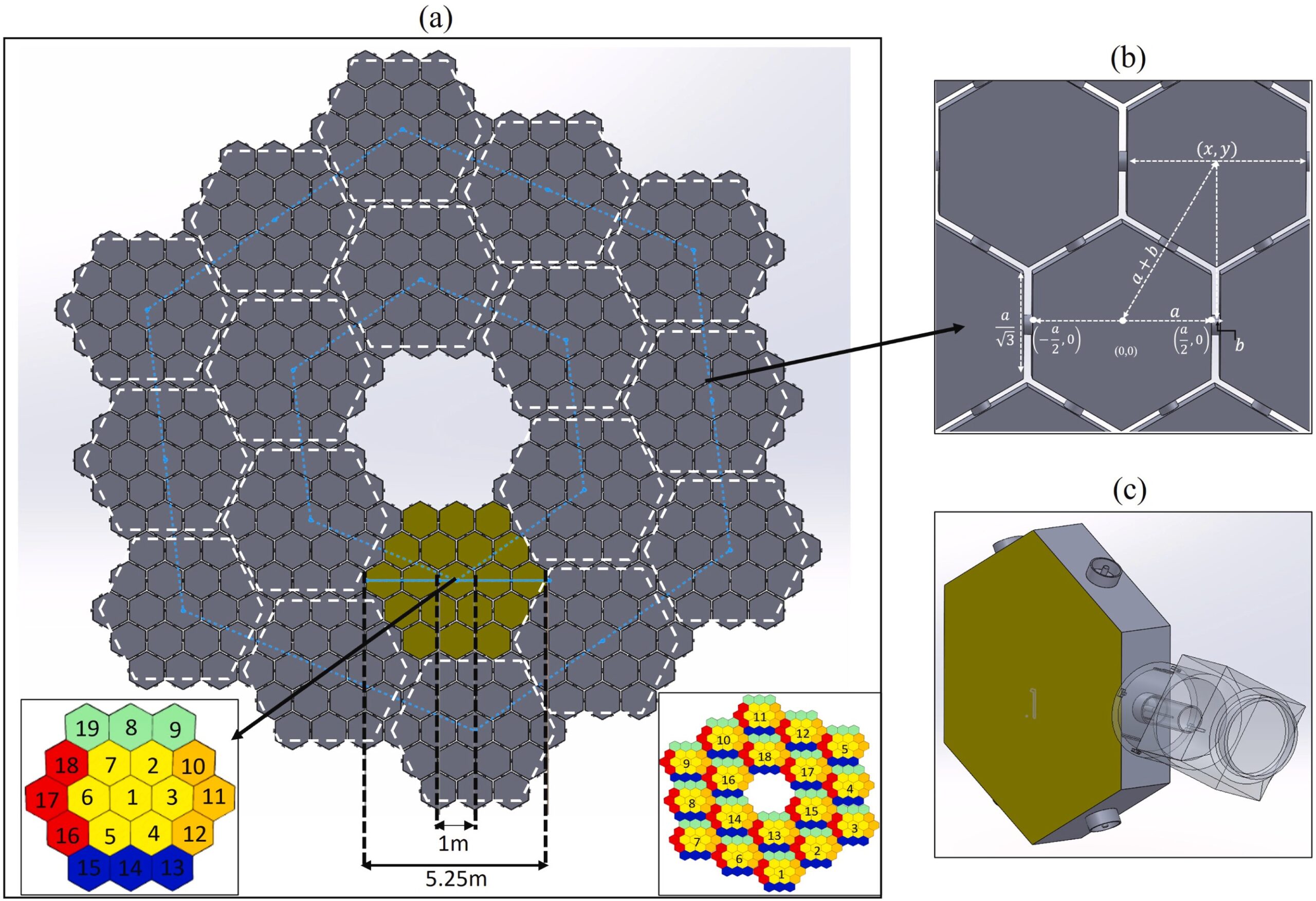
مطالعه موردی آنها LAST فرضی است، یک تلسکوپ فضایی با دیافراگم بزرگ با یک آینه اولیه ۲۵ متری با میدان وسیع که در نور مرئی عمل می کند. LAST پسزمینهای برای مطالعه امکانسنجی محققان است.
آینه اصلی LAST ماژولار خواهد بود و قطعه آن دارای پورتهای اتصال و رابطهایی برای ساخت و ساز و انتقال داده، نیرو و حرارت خواهد بود. این نوع مدولار بودن، مونتاژ تلسکوپ را برای سیستم های خودمختار آسان تر می کند.
LAST آینه خود را با استفاده از واحدهای آینه اولیه (PMU) می سازد. ۱۹ PMU یک بخش آینه اولیه (PMS) را تشکیل می دهند و ۱۸ PMS آینه اولیه ۲۵ متری LAST را تشکیل می دهد. در مجموع ۳۴۲ PMU برای تکمیل تلسکوپ مورد نیاز است.
مفهوم E-Walker همچنین دارای دو فضاپیما خواهد بود: یک فضاپیمای پایه (BSC) و یک فضاپیمای ذخیره سازی (SSC). BSC به عنوان نوعی کشتی مادر عمل می کند و دستورات مورد نیاز را به E-Walker ارسال می کند، وضعیت عملیاتی آن را نظارت می کند و اطمینان می دهد که همه چیز به خوبی پیش می رود. SSC همه PMU ها را در یک آرایش انباشته نگه می دارد و E-Walker هر بار یکی را بازیابی می کند.
محققان یازده مفهوم مختلف عملیات (ConOps) را برای آخرین ماموریت توسعه دادند. برخی از ConOps شامل چندین E-walker بود که به صورت مشترک کار می کردند. اهداف بهینه سازی اشتراک وظایف، اولویت بندی جرم بالابر از زمین و ساده سازی کنترل و برنامه ریزی حرکت است. آنها توضیح می دهند: ‘یازده سناریوی ماموریت فوق الذکر بیشتر مورد مطالعه قرار گرفته اند تا عملی ترین ConOps برای مونتاژ ۲۵ متر LAST انتخاب شود.’
ابزارهای پیشرفته ای مانند رباتیک و هوش مصنوعی در آینده اکتشافات فضایی پایه های اصلی خواهند بود. تقریبا غیرممکن است که آینده ای را تصور کنیم که در آن حیاتی نباشد، به خصوص که اهداف ما پیچیده تر می شوند. نویسندگان می نویسند: «قابلیت مونتاژ سیستم های پیچیده در مدار با استفاده از یک یا چند ربات یک الزام مطلق برای پشتیبانی از اکوسیستم مداری آینده انعطاف پذیر خواهد بود. در دهههای آینده، زیرساختهای جدیدتر در مدارهای زمین، که بسیار پیشرفتهتر از ایستگاه فضایی بینالمللی هستند، برای سرویسدهی، ساخت، بازیافت، انبار مداری، انرژی خورشیدی مبتنی بر فضا (SBSP) و نجومی مورد نیاز است. و ایستگاه های رصد زمین.»
نویسندگان اشاره می کنند که کار آنها بر اساس برخی مفروضات و مدل های نظری است. مفهوم E-walker هنوز نیاز به کار زیادی دارد، اما نمونه اولیه آن در حال توسعه است.
این احتمال وجود دارد که E-walker یا برخی از سیستم های مشابه در نهایت برای ساخت تلسکوپ ها، ایستگاه های فضایی و زیرساخت های دیگر استفاده شود.