کاوشگران رباتیک می توانند برای بازدید از سیارات همسایه ما در اطراف منظومه شمسی سفر کنند، اما زمانی که آنها می رسند، گاهی اوقات یک بسته علمی باید روی سطح مستقر شود. هرگز به ذهنم نرسید که چگونه به آن دست یافتم! با برنامه ریزی تعدادی از فرودگرها برای بازدید از ماه، ناسا در حال آزمایش یک بازوی رباتیک جدید به نام سیستم دستکاری سطح سبک وزن AutoNomy قابلیت توسعه برای عملیات سطحی یا به اختصار LANDO است! محمولهها را از فرودگر بلند کرده و به آرامی روی سطح ماه پایین میآورد.
ماه همیشه جایگاه ویژه ای در قلب ما داشته است. از آنجایی که اولین انسانها آن را در حالی که به آسمان خیره میشدند، دیدند، نوادگان آنها به شیفتگی نزدیکترین همسایه ما ادامه دادند. هنرمندان، موسیقی دانان، شاعران و نویسندگان تنها معدود اعضای جامعه ما هستند که به زیبایی آن تأمل کرده اند. طبیعی بود که اولین هدف برای اکتشاف انسان در سپیده دم پرواز فضایی باشد. ماموریتهای آپولو اولین بازدیدکنندگان انسانی را به ماه دیدند و اکنون با نفس بند آمده منتظر میمانیم زیرا به نظر میرسد آرتمیس قرار است ما را دوباره به زودی بازگرداند.
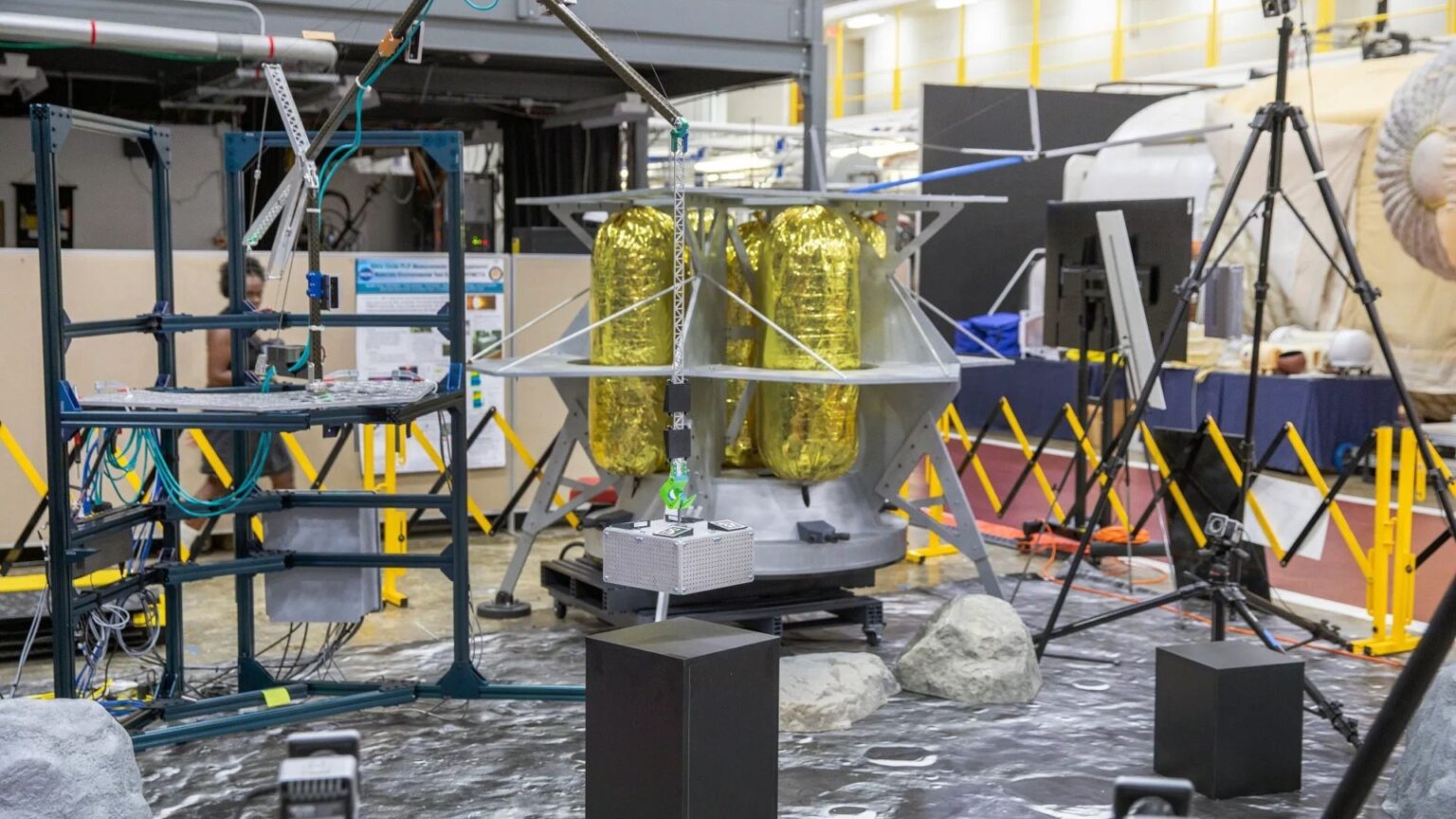
حتی با وجود کاوشگران انسانی، این احتمال وجود دارد که در یک زمان فقط چند نفر باشند، بنابراین برنامه ریزان ماموریت برای کارهای پیش پا افتاده تر به کمک های رباتیک روی می آورند. تیمی از محققان در مرکز تحقیقاتی لانگلی در ویرجینیا بر روی قطعهای از سختافزار روباتیک با نرمافزار جدید کار میکنند که میتواند به طور مستقل برای حرکت اجسام روی سطح کار کند. این تیم به رهبری دکتر جولیا کلین از ناسا سیستم LANDO را به نمایش گذاشتند و عملکرد عالی داشت.
این تیم که شبیه یک مجموعه فیلم به نظر میرسد، فضایی را ایجاد کرد که شباهت زیادی به ماه دارد، با صخرههایی که هالیوود به آنها افتخار میکند. این تیم اولین آزمایش خود را با بلند کردن یک محموله از روی یک پایه سیاه بلند و قرار دادن آن روی زمین انجام داد. سپس، آنها چالش را افزایش دادند و همان مانور را با یک مریخنورد کوچک امتحان کردند. هر دو آزمایش با موفقیت انجام شد.
محوری سیستم مجموعه ای از حسگرها روی دوربین و رمزگذارهایی است که در کنار بسته چسبانده شده اند. هنگامی که سیستم آماده شد، دوربین منطقه را اسکن کرد و به دنبال محموله ای که با رمزگذارها مشخص شده بود (تا حدودی شبیه یک کد QR) بود. پس از شناسایی آیتم، بازوی رباتیک به آرامی بر روی شی تاب خورد و با دقت قلاب خود را برای به دام انداختن بسته مانور داد. . با مقصدی که قبلاً با استفاده از رابط گرافیکی صحنه تعریف شده بود، بازوی رباتیک به اطراف حرکت کرد و بسته قرار داده شده را دقیقاً همان جایی که تیم دستور داده بود، رها کرد.
پس از تحویل موفقیت آمیز، قلاب به آرامی جدا شد، به موقعیت اصلی خود بازگشت و مکث کرد و آماده فرمان بعدی بود. این آزمایش به خوبی قابلیت اطمینان سیستم را که صحنه را برای آزمایشهای پیشرفتهتر تنظیم میکند، نشان داد. اکنون این تیم به دنبال توسعه یک نسخه بزرگتر قوی تر است که می تواند قبل از اولین ماموریت ماه خود آزمایش شود.